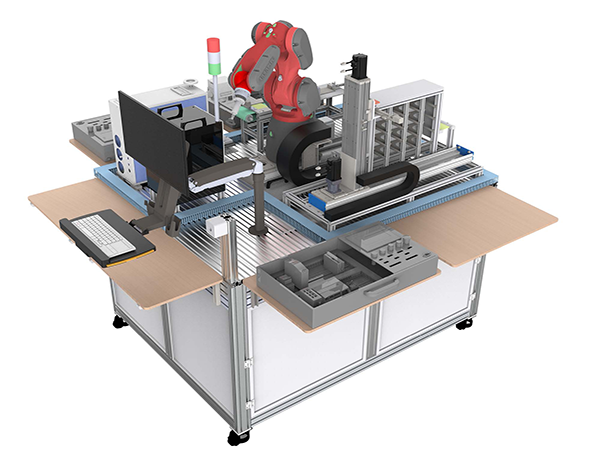
复合机器⼈是⼀种集移动机器⼈和协作机器⼈于⼀体的新型机器⼈。
随着⼯⼚内部制造复杂程度的⽇益上升,对于⾃动化设备柔性化的需求也更加迫切,相⽐于AGV/AMR、协作机器⼈、机器视觉的单⼀功能,集合了三者特性的复合移动机器⼈显然更具柔性化。
复合机器⼈可快速布局于⾃动化⼯⼚、机房数据管理(存储服务器数据取放)、电⼒巡检、仓储分拣、⾃动化货物超市、⽆⼈实验室,实现物料⾃动搬运、物品上下料、物料分拣等,更好的满⾜⾏业需求。
产品参数:
1、机械臂:6轴协作机器人;
2、能源系统:48V/52Ah(三元锂);
3、工作半径:1350mm(最大);
4、工作时长:8小时;
5、负载:3KG/5KG/10KG;
6、充电时间(10~80%):≤2.5小时;
7、定位精度:±0.1mm;
8、充电方式:手动/自动;
9、防护等级:IP54;
10、驱动方式:高精度双轮差速驱动;
11、控制柜通讯协议:Ethernet,Modbus-RUT/TCP;
12、转弯直径:840/1040mm;
13、供电电源:DC 48V;
14、导航位置精度:±5mm;
15、移动机器人水平负载:150KG/300KG;
16、自动避让距离:<1m;
17、其他:可搭配机器视觉、电动夹爪等末端执行机构;技术优势:
1、多场景通⽤:智能识别、柔性抓取、智能搬运。
2、自建场景地图:对行人或其他动态障碍物可自主避让,自主规划路径,无需人工干涉。
3、⾃主⼈体跟随:⾃动学习和识别⼈体形状特征,智能跟随。
4、地图禁区编辑:配套地图编辑软件,可设置和保存机器人运行环境禁区。
5、高安全防护:机器人配备高速激光,超声波等多种传感器。
6、虚拟道路规划:可以通过画线的⽅式,规划机器⼈的运动轨迹,让机器⼈按照指定线路⾏进。
7、流程图编程:有允许操作者编辑的任务模块软件,可根据⾃⾝需求灵活设计机器⼈的⾏为,零基础操作。
8、协作与安全:具有先进的碰撞检测功能,发⽣⾮预期碰撞可以⾃动停⽌运⾏,保护操作⼈员和周围设备不受伤害。同时可以设置机器⼈的碰撞检测等级,满⾜不同状况下的安全要求。
9、模块化:采⽤模块化可重构设计,⽤⼾可根据⾃⾝需求,通过ROS或其它平台对关节模块重新组合,快速配置新结构机械臂,另外维护和保养更加的快速和便捷。
10、扩展性:⽀持Python和Lua两种脚本语⾔扩展库,可以充分利⽤脚本语⾔的特性,使软件具有更⾼的移植性和扩展性,功能更加的丰富和灵活。
11、通讯能⼒:提供基于TCP/IP⽹络协议的控制接⼝,SDK包含C和C++两个版本,⽀持ROS机器⼈操作系统,在科研和教育领域应⽤⼴泛。
加工制造
仓储物流
轨道交通
医药实验
航空航天
|
|
Copyright © 2021 四川桐江科技有限公司 All rights reserved 蜀ICP备2022003436号 川公网安备 51010402001356号
川公网安备 51010402001356号